Natural plants and muscular organs have the ability to convert physical or chemical signals into macroscopic movements. For example, some can form complex shapes in response to specific external stimuli in the environment.
Inspired by these biological examples, the research group headed by Professor ZHOU Feng at the Lanzhou Institute of Chemical Physics of the Chinese Academy of Sciences has created a well-defined hydroresponsive self-folding device that can fold into complex three-dimensional structures and can perform active movement on surfaces with a roughness gradient.
The device is a caterpillar–mimetic bilayer actuator based on a wrinkled polydimethylsiloxane (PDMS) elastomer decorated with a hydroresponsive polyelectrolyte brush. The actuator can fold fast into complex three-dimensional structures upon a change in relative humidity of the surrounding air. Upon increasing the humidity or immersed in water, the brush swells and the resulting lateral pressure leads to a bending movement of the rubber within a fraction of a second. The direction of bending can be manipulated by introducing a pattern of wrinkles on the PDMS substrate. And some unique structures such as helicoid and gradient which are seldom reported in the case of bilayered devices can be obtained.
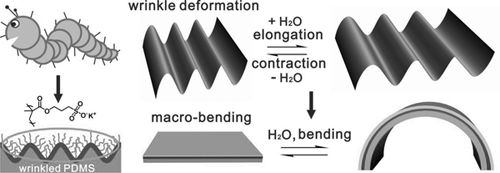
Schematic illustration of elongation/contraction of the wrinkles and bending of a soft bilayer that resembles the movement of a caterpillar. (Image by ZHOU Feng et al.)
The actuation is fast, reversible, reproducible, and robust. When the environmental humidity is repeatedly cycled up and down, the small device walks on a surface with a roughness gradient, which is reminiscent of the muscle-like movements.
It is hoped that that the design can be used in a variety of applications where programmable shape changes are needed, including actuators, cell encapsulation, artificial muscles, and “soft robotics”.
The study was supported by the grant from National Science Foundation of China (Grant Nos. 20434009, 51335010, and 21125316) and Key Research Program of CAS (KJZD-EW-M01).
The work has been published in Small(2015, doi: 10.1002/smll.201500577).
Key words: actuators; caterpillars; PDMS wrinkles; polyelectrolyte brushes; self-walking
Contact:
ZHOU Feng
State Key Laboratory of Solid Lubrciation, Lanzhou Institute of Chemical Physics, Chinese Academy of Sciences
E-mail:zhouf@licp.cas.cn
